Estimasi kecepatan kendaraan
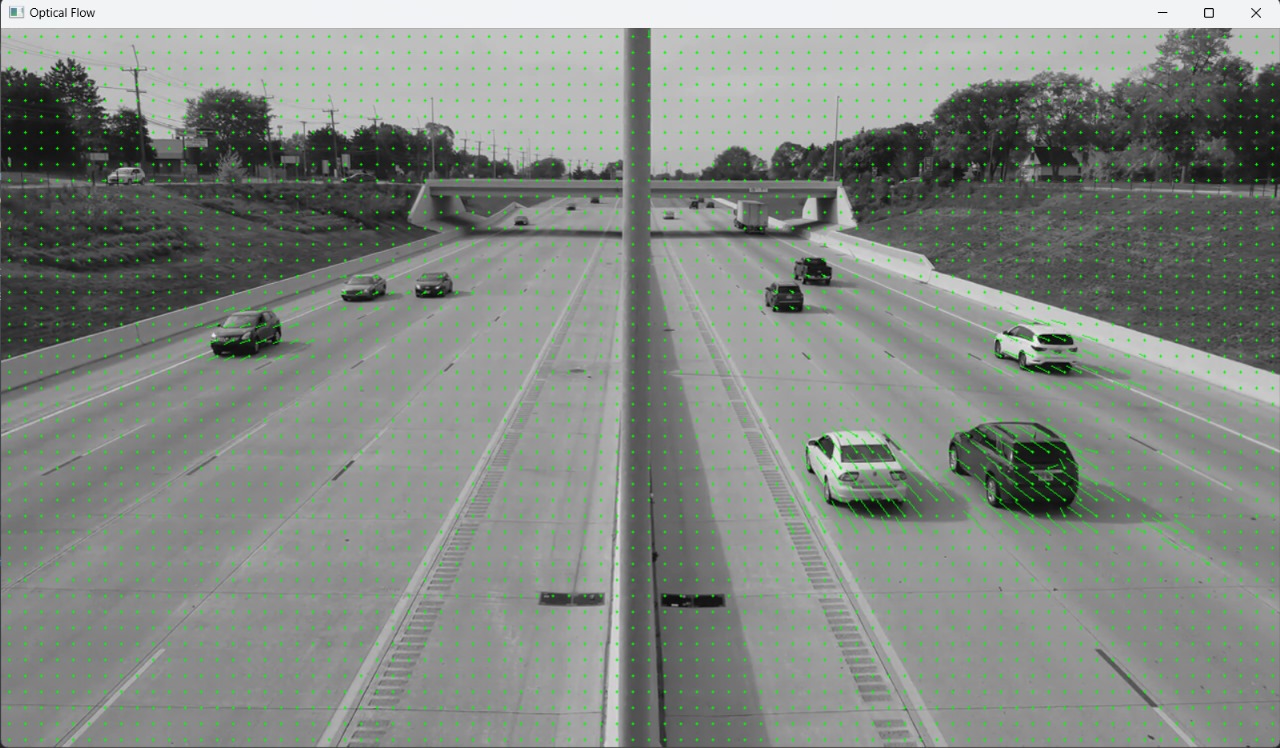
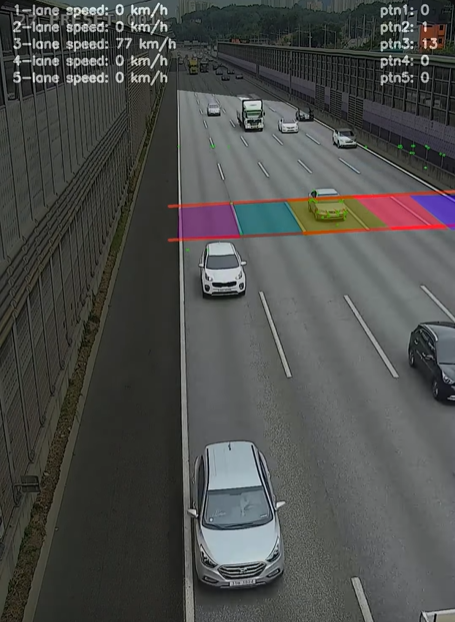
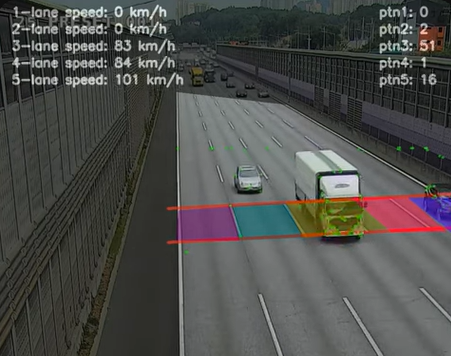
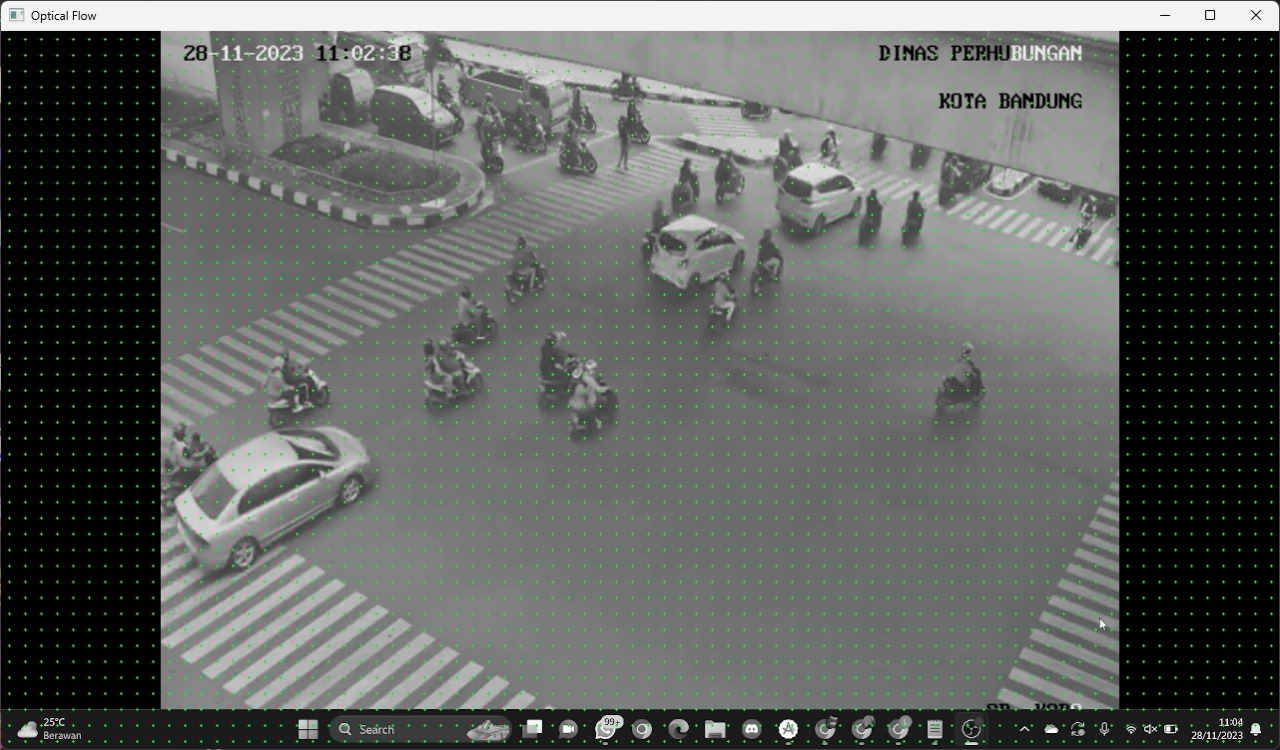
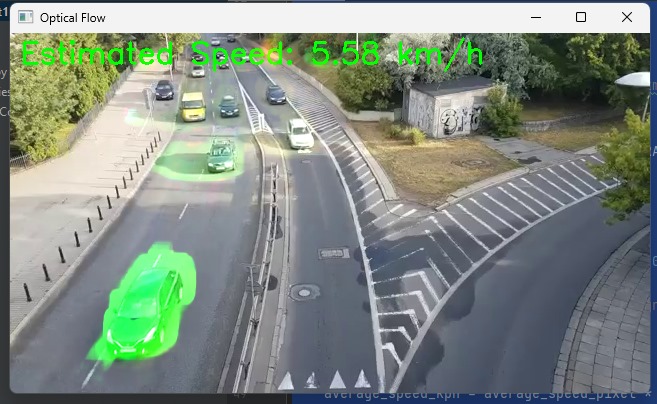
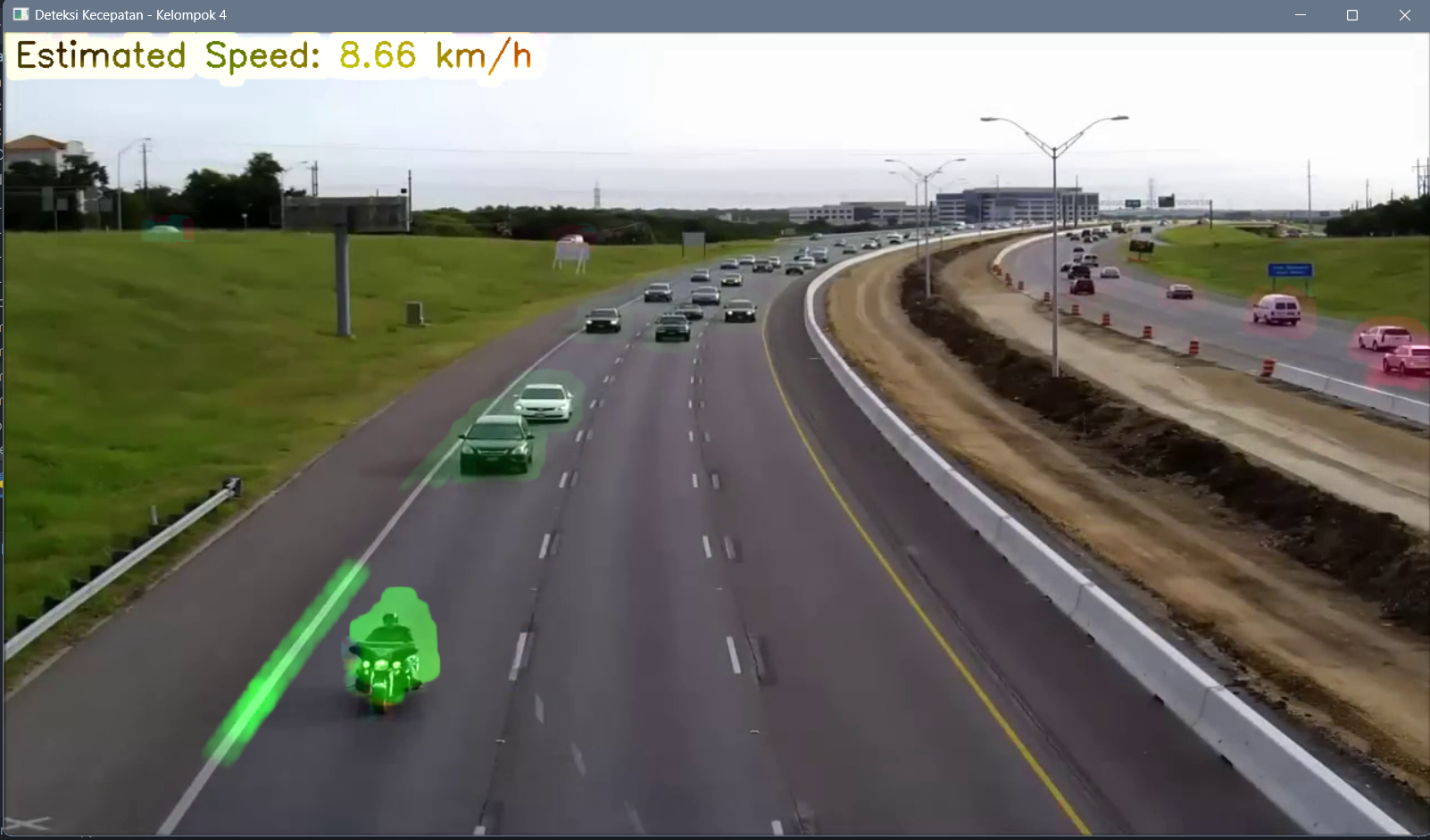
Mahasiswa menganalisis video lalu lintas menggunakan teknik optical flow untuk mengestimasi kecepatan kendaraan. Hasilkan visualisasi vektor kecepatan untuk tiap kendaraan serta hitung rata-rata kecepatannya.
Indikator Penilaiannya
Judul Rubrik: Estimasi kecepatan kendaraan - Analisis Aliran Optik
|
Kriteria |
3 |
2 |
1 |
|
Pemahaman tentang Aliran Optik |
Mahasiswa menunjukkan pemahaman yang mendalam tentang aliran optik dan aplikasinya dalam menganalisis video lalu lintas. |
Mahasiswa menunjukkan pemahaman dasar tentang aliran optik dan aplikasinya dalam menganalisis video lalu lintas. |
Mahasiswa menunjukkan pemahaman terbatas tentang aliran optik dan aplikasinya dalam menganalisis video lalu lintas. |
|
Analisis Video Lalu Lintas |
Mahasiswa secara akurat menganalisis video lalu lintas menggunakan teknik aliran optik untuk memperkirakan kecepatan kendaraan. Visualisasi vektor kecepatan kendaraan jelas dan akurat. |
Mahasiswa sebagian menganalisis video lalu lintas menggunakan teknik aliran optik untuk memperkirakan kecepatan kendaraan. Visualisasi vektor kecepatan kendaraan agak jelas dan akurat. |
Mahasiswa mencoba menganalisis video lalu lintas menggunakan teknik aliran optik untuk memperkirakan kecepatan kendaraan, tetapi analisisnya tidak lengkap atau tidak akurat. Visualisasi vektor kecepatan kendaraan kurang jelas dan akurat. |
|
Penghitungan Kecepatan Rata-rata |
Mahasiswa dengan benar menghitung kecepatan rata-rata setiap kendaraan berdasarkan analisis aliran optik. |
Mahasiswa sebagian menghitung kecepatan rata-rata setiap kendaraan berdasarkan analisis aliran optik. |
Mahasiswa mencoba menghitung kecepatan rata-rata setiap kendaraan berdasarkan analisis aliran optik, tetapi perhitungan tersebut tidak benar atau tidak lengkap. |